隨著城市建設的快速發(fā)展�����,隧道作為交通運輸����、城市基礎設施建設和地下工程的重要組成部分����,越來越多地被應用于地鐵����、高速公路���、排水系統(tǒng)等領域���。隧道的巡檢工作是保證隧道結構安全和長期穩(wěn)定運行的關鍵環(huán)節(jié)。傳統(tǒng)的人工巡檢方式不僅耗時費力�����,而且存在安全隱患,因此�,隧道巡檢機器人應運而生,成為了現(xiàn)代隧道管理的重要工具�。
1.自動行走與導航
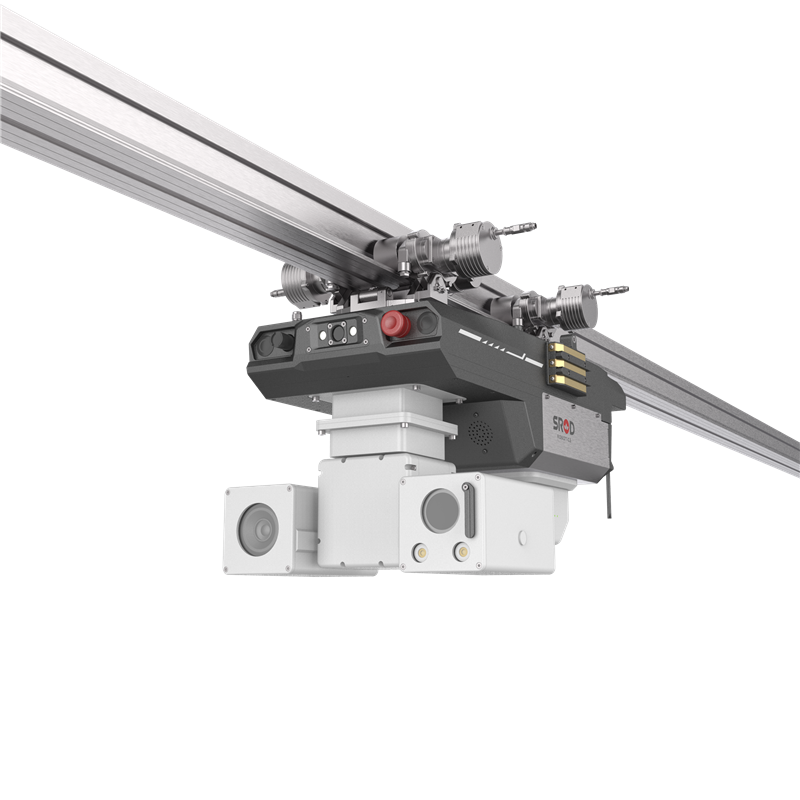
通常配備了輪式或履帶式行走系統(tǒng)����,可以沿著隧道軌道自動行走����,并通過內(nèi)置的激光雷達���、超聲波�����、攝像頭等傳感器進行環(huán)境感知。機器人能夠利用這些傳感器避開障礙物����,實現(xiàn)自主導航,確保順利完成巡檢任務��。
2.數(shù)據(jù)采集與傳輸
集成了多種傳感器�,如溫濕度傳感器�����、裂縫傳感器��、氣體傳感器等,用于采集隧道內(nèi)部的各項數(shù)據(jù)�。這些數(shù)據(jù)可以實時傳輸給遠程操作人員����,方便工作人員對隧道的健康狀況進行評估�����。
3.視頻監(jiān)控與圖像處理
配備高清攝像頭����,能夠實時拍攝隧道內(nèi)的圖像和視頻�,并通過圖像識別技術檢測隧道結構的裂縫�����、腐蝕、滲水等問題��。機器人的視覺系統(tǒng)能夠識別出細微的裂縫和其他潛在問題�����,確保巡檢的精度。
4.遠程控制與自動化
能夠實現(xiàn)遠程控制,工作人員可以通過控制中心監(jiān)控機器人的工作狀態(tài)�,并根據(jù)需要調(diào)整機器人的巡檢路徑和檢測重點���。此外,部分機器人還具備自主決策能力��,能夠根據(jù)環(huán)境變化自動調(diào)整巡檢策略���。
關鍵技術:
1.導航與定位技術
需在復雜����、封閉的隧道環(huán)境中進行導航�,定位技術至關重要�。常見的定位方法包括激光雷達(Lidar)技術、視覺定位���、慣性導航系統(tǒng)(INS)等��。這些技術能夠幫助機器人實時獲取自己的位置,并規(guī)劃優(yōu)的巡檢路徑�。
2.環(huán)境感知與障礙物避讓技術
隧道環(huán)境復雜且狹窄�,機器人需要具備*的環(huán)境感知能力��。激光雷達����、超聲波傳感器�、紅外傳感器等可以幫助機器人感知周圍環(huán)境,識別障礙物并及時避讓���。這些技術可以提高機器人的巡檢效率����,并確保其安全運行�。
3.圖像識別與分析技術
視覺系統(tǒng)通常包括高清攝像頭和激光掃描系統(tǒng),用于采集隧道的圖像數(shù)據(jù)�����。通過圖像處理和分析技術,機器人能夠識別裂縫�����、沉降��、漏水等問題。近年來��,人工智能(AI)技術和深度學習算法在圖像識別中的應用,使得機器人能夠更精確地識別出細微的缺陷����。
4.數(shù)據(jù)傳輸與通信技術
需實時傳輸采集到的數(shù)據(jù)和圖像給操作人員�����,以便進行進一步分析��。無線通信技術、5G技術和低延遲數(shù)據(jù)傳輸技術在這方面發(fā)揮了重要作用�,確保機器人與控制中心之間的數(shù)據(jù)傳輸及時���、穩(wěn)定����。
5.電池與續(xù)航技術
通常需要在長時間的巡檢任務中保持穩(wěn)定的工作狀態(tài)�����,因此電池的續(xù)航能力非常重要�����。高效的電池管理系統(tǒng)�、快速充電技術以及低功耗設計���,使得機器人能夠在隧道內(nèi)進行長時間的巡檢作業(yè)�,減少了頻繁充電的麻煩���。
隧道巡檢機器人的應用領域:
1.地鐵和交通隧道
隨著地鐵建設的推進��,地鐵隧道的巡檢工作變得尤為重要�。能夠替代人工進行地鐵隧道的定期檢查���,減少了人工巡檢的危險性和勞動力成本,提高了工作效率���。
2.公路隧道
公路隧道的巡檢工作關系到行車安全����,能夠精確地檢測出隧道內(nèi)的裂縫���、腐蝕等問題����,及時發(fā)現(xiàn)隱患�,確保公路隧道的安全運營����。
3.水利與排水隧道
水利工程中的排水隧道需要定期巡檢以防止?jié)B漏��、堵塞等問題。能夠在水下或濕潤環(huán)境中進行巡檢�����,發(fā)現(xiàn)水利設施中的潛在問題����,保障水利工程的長期運行�����。
4.礦山隧道
在礦山開采過程中,礦山隧道的安全至關重要��。能夠實時監(jiān)測礦井的結構情況,檢查隧道的裂縫�、沉降和氣體泄漏等問題����,有助于提高礦井作業(yè)的安全性。

 更新時間:2025-11-12
更新時間:2025-11-12 點擊次數(shù):300
點擊次數(shù):300


 當前位置:
當前位置: